/weekSix.tech_beyond_the_myth.1
(14_november_2021)
During this first week of Tech Beyond the Myth with Guillem Camprodon, Óscar
González and Victor Barberán as facilitators, we have been working on two
different topics: Forensics of the obsolescense and Measuring the world. The
first one was an introduction to the current industrial model where most of the
products have a supposed programmed obsolescence and where the supply chain has
an important weight in the manufacture and composition of the products we use in
our daily life. The second part was aimed at getting to know the world of data
and working on the process of collecting data based on an objective, analysing
the information collected and obtaining results. It was also a way to reflect
on privacy and everything that involves the data we provide to large companies.
To work on the concepts discussed in class, we held two workshops during the week.
The first, on forensics of the obsolescense, was a one-day activity and the second,
on measuring the world, took up the remaining three days. I will explain below what
they consisted of and what the experience was like.
.forensics_of_the_obsolescence
In this first workshop, we were divided into groups of 5-6 people and we chose
one of the appliances and devices that the FabLab members had brought us. My
group was formed by Angel, Audrey, Joaquin, Roberto and myself. We decided to
choose the iRobot Roomba first generation, a well-known but at the same time uncommon product
in our lives. Afterwards, we had to dismantle it completely, piece by piece, in
order to analyse how the product works, to find out which part had stopped working
and which was still working, to analyse the production chain and the origin of the
parts, etc.

These are some of the conclusions from the forensic observation:
- As an initial observation, some components were not easily disassembled with a screwdriver and had to be torn manually. This prevents the possibility of repair past its original estimated product lifetime and relies on dependency to a central manufacturer.
- Additionally, we noticed that despite its internal filtration components, dirt and debris managed to make their way inside the controller section where debris shouldn’t go. This could contribute to a rapid deterioration of the product.
- The mechanics of the iRobot Roomba 500 lent themselves to a misuse of energy by following a random path of cleaning which would expend the rechargable battery at a faster rate than it would if it followed a more logical cleaning path. This shortened the lifespan of the rechargable battery considerably.
To see the full forensic report, you can access this link:
https://hackmd.io/INk2gThpSkObQQ_E62gxow?view
.measuring_the_world
In this second workshop we also divided into groups and started brainstorming
about things we would like to change in our environment or in our lives. Our group,
formed by Andrea, Kai, Rei, Ruben and myself, focused on two main ideas: IAAC
facilities and street life. Around these two concepts there were many other issues
such as the lack of rubbish to recycle in the classroom or the fact that we couldn't
eat inside the facilities, and on the other hand the bad smell of some streets in
Barcelona or the fact that people don't always pick up dog poop.
Finally we decided to focus on the fact that you can't eat inside IAAC and we set
the goal "I want to eat inside IAAC". From here, we started to think of questions
that would serve as the basis of our data collection, taking into account the factors
that affect our main objective. We chose the question "Is there a space for a
(covid-safe) lunch?" and later on we also added another one related to people:
"Are there people in Iaac interested in having a space to have lunch?".
After we had the hypothesis, the FabLab members gave each group a tool to collect
information. To distribute them, we did a reverse auction where each group gave
arguments about the tools that could work for the other groups. The PiCamera was
finally the tool that we ended up keeping, as both we and the other groups thought
it was the best way to get information about our topic.
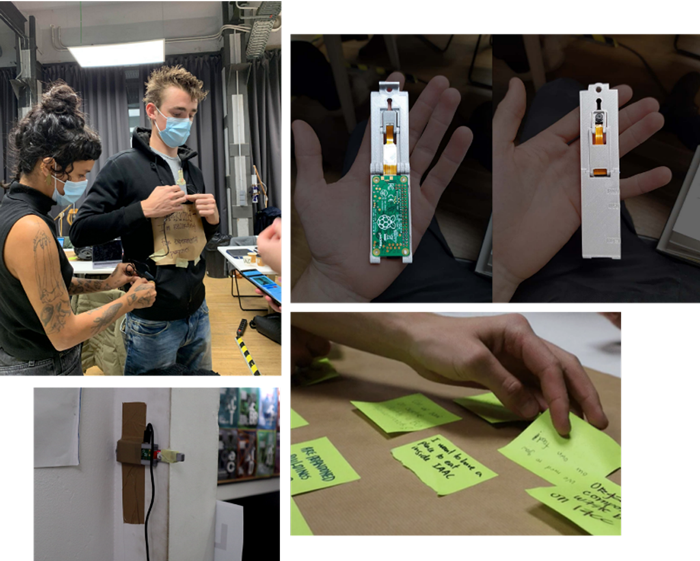
From there we started to think about how we could collect information only with
the camera and what form would give us the most accurate data and we created a
strategy for action.
For more information about the intervention you can go directly to the page where
the whole process is explained. Here you can also see the data collected and the
analysis of the results:
https://hackmd.io/yuFYaQYJRyyZ_crpabA0-Q?view
As a conclusion of this experiment, we believe that we could not obtain all the
necessary information to solve our problem due to two main factors: time and tools.
We also had some problems with the PiCamera that made us lose some recordings that
could be important for our research. Still, thinking about how the intervention would
have to be in order to be able to collect the data in an optimal way also helped
a lot to understand how this whole process works and what are the most appropriate
conditions and paths to take.
